
Практическое занятие № 2
Кинематический анализ плоского рычажного механизма
Содержание
|
2.1 |
Определение скоростей точек звеньев и угловых скоростей звеньев методом планов |
|
|
2.2 |
Определение ускорений точек звеньев и угловых ускорений звеньев методом планов. |
Кинематический анализ механизмов предусматривает решение следующих основных задач:
– определение положения звеньев и построение траектории движения отдельных точек;
– определение скоростей точек и угловых скоростей звеньев;
– определение ускорения точек и угловых ускорений звеньев.
Решение этих задач может быть найдено графическим или аналитическим методом. Графический метод имеет меньшую точность по сравнению с аналитическим, но является более наглядным, требует меньше затрат и применяется на первой стадии проектирования механизма. Аналитический метод используется на второй стадии проектирования, когда необходимо решить вопросы оптимизации параметров выбранной кинематической схемы с использованием ЭВМ ввиду большого объема вычислительной работы.
Кинематическую схему механизма вычерчивают в масштабе на половине листа формата А4, используя масштабный коэффициент длины звеньев. При построении планов скоростей и ускорений используют масштабные коэффициенты скорости и ускорения .
Под масштабным коэффициентом понимают число, показывающее, сколько единиц некоторой величины, изображает 1 мм чертежа.
Действительные длины звеньев условимся обозначать буквой с индексом названия звена, т. е. , , (рисунке 1.1). Длины этих же звеньев, изображаемые на кинематической схеме в масштабе, обозначают, , .Таким образом, масштабный коэффициент длины звеньев можно записать
.
Длину отрезка на чертеже (в мм), изображающего звено механизма, вычисляют по формуле (например, длина отрезка, изображающего на схеме звено 2, рисунке 1.1):
.
При вычерчивании в масштабе кинематической схемы механизма длиной одного из отрезков, изображающего какое-то выбранное звено, задаются. Далее вычисляют масштабный коэффициент и длину остальных отрезков, изображающих на схеме звенья.
Масштабные коэффициенты , , скорости и , , ускорения точек звеньев механизма вычисляют по следующим формулам:
, ,
где – скорость точки A звена 1, ;
– нормальное ускорение точки A того же звена, ;
– отрезок, изображающий на плане скоростей скорость точки A, мм;
– отрезок, изображающий на плане ускорений нормальное ускорение точки A, мм.
При вычерчивании в масштабе планов скоростей и ускорений поступают аналогично вычерчиванию в масштабе кинематической схемы механизма.
2.1 Определение скоростей точек звеньев и угловых
скоростей звеньев методом планов
Графические методы определения скоростей и ускорений точек звеньев широко применяются в инженерных расчетах. Их сущность основана на использовании векторных уравнений, связывающих скорости, а также ускорения отдельных точек звеньев механизма с последующим их решением графическим путем. Рассмотрим эти методы на примере механизма, изображенного на рисунке 2.1.
Исходные данные для определения скоростей и ускорений точек звеньев механизма: угловая скорость() звена 1, длины , , (м) звеньев 1, 2, 4, .
Составим векторные уравнения, связывающие скорости точек звеньев механизма. Звено AB совершает плоское движение, которое можно разложить на поступательное и вращательное вокруг полюса A. Скорость точки B равна
, (1)
где – скорость точки A;
– относительная скорость точки B во вращательном движении вокруг полюса A.
С другой стороны звено 3 движется поступательно относительно стойки и можно записать
, (2)
где – скорость стойки (стойка – неподвижная);
– относительная скорость точки B, направленная по линии движения ползуна (звено 3).
Таким образом, можно записать
. (3)
По аналогии скорость точки D
. (4)
|
|
|
|
б) |
|
|
|
|
|
а) |
в) |
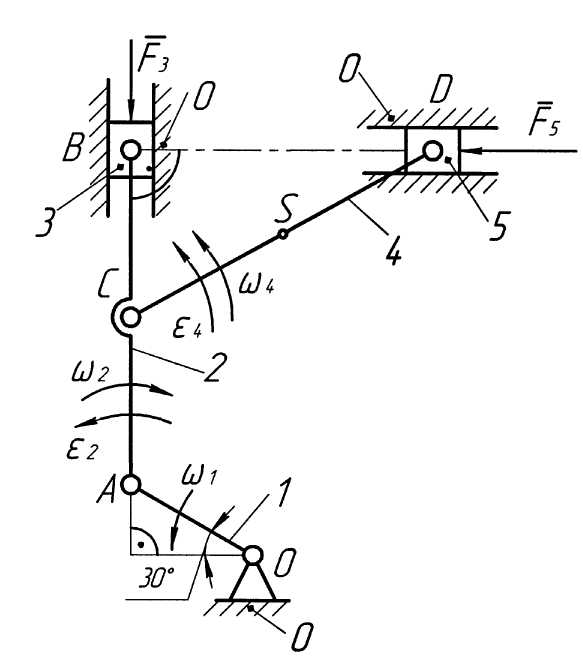
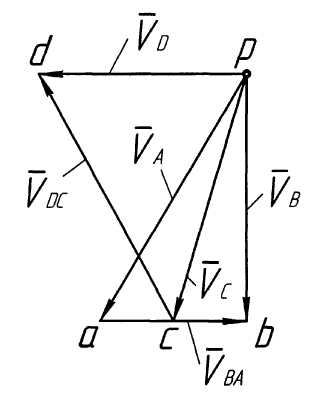
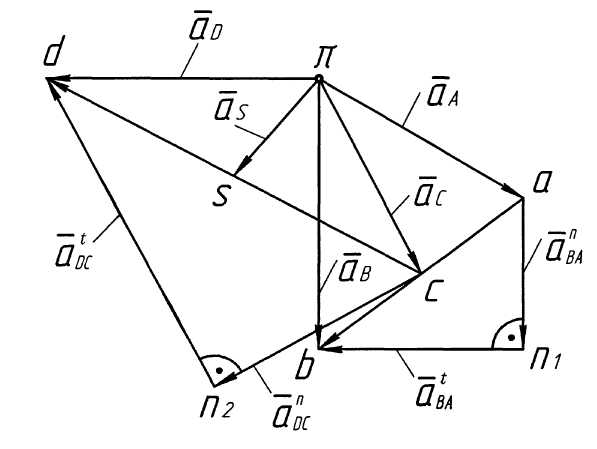
Рисунок 2.1– Построение планов: а – кинематическая схема механизма;
б – план скоростей; в – план ускорений
Кроме того , так как точки C и B расположены на одном звене 2 ( – коэффициент пропорциональности).
Запишем составленные векторные уравнения в виде системы:
(2.1)
В системе (2.1) векторных уравнений , , , – абсолютные скорости точек A,B,C,D звеньев механизма;, , – скорости точек B,C,D вокруг полюсов A,C. В дальнейшем их будем называть скоростью некоторой точки относительной другой. Например, вектор является относительной скоростью точки B по отношению к точкеA (для краткости – скорость точки B относительно точкиA);, – скорости точек Bи D относительно стойки 0.
Уравнения (2.1) позволяют определить скорости рассматриваемых точек механизма. Они могут быть решены графическим методом, который основан на построении планов скоростей.
Метод построения плана скоростей для заданного на рисунке 2.1 положения механизма осуществляется в следующем порядке.
- Вычисляют значение скорости , :
,
где – угловая скорость начального звена 1, ;
– длина звена 1, м.
- Рассматривают первое векторное равенство системы уравнений (2.1). Принимают во внимание, что вектор определен ранее, а вектор направлен перпендикулярно к оси звена AB в сторону вращения этого звена, т. е. по направлению угловой скорости звена 2. Скорость можно записать
, (2.2)