
где – угловая скорость второго звена AB, ;
– длина звена 2, м.
В формуле (2.2) величина угловой скорости не известна и подлежит определению, следовательно, на данном этапе неизвестной является величина скорости , но как было указано выше известно ее направление – перпендикулярно оси звена AB.
Из первого равенства системы (2.1) следует, что вектор равен вектору . Величина скорости неизвестна, но известно, что звено 3 (ползун) совершает возвратно-поступательные прямолинейные движения по вертикальной линии в направляющих стойки. Поэтому вектор скорости будет направлен также по вертикальной линии, проходящей через точку B.
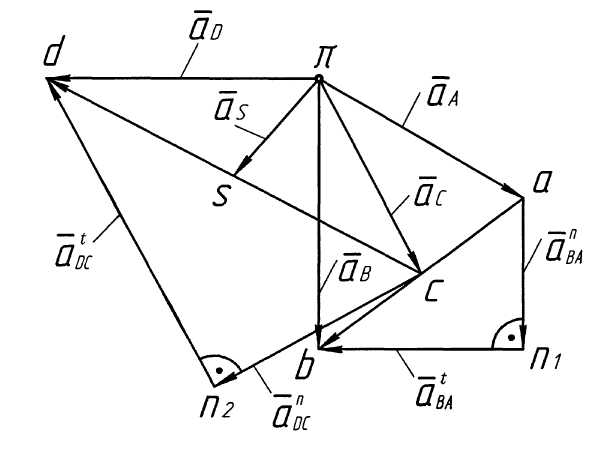
- Строят план скоростей для заданного положения механизма. Из произвольной точки “p” (рисунок 2.1,б) откладываем определенный отрезок,перпендикулярный оси звена 1. Считается, что отрезок представляет собой вектор скорости в выбранном масштабе. Вычисляют масштабный коэффициент , :
.
Отрезок должен быть выбран такого размера, чтобы установленный масштабный коэффициент способствовал удобству вычислений и построений векторов скоростей. Отрезок принимают 50…60 мм.
Из точки “а” проводят прямую, имеющую направление вектора скоростей , т. е. перпендикулярную оси звена АВ. Через точку “p” проводят прямую параллельную оси движения звена 3 (ползуна). Направление этой прямой соответствует направлению вектора скорости . Точка “b”пересечения этих прямых определяет конец вектора скорости точки B механизма. На плане скоростей скорость , , представлена отрезком . Величину этой скорости определяют по формуле:
.
Полученный при построении треугольник pab называется планом скоростей звена 2, а точка p – полюсом плана скоростей.
При наличии плана скоростей звена всегда можно определить скорость любой точки, принадлежащей этому звену, например, точки C.
Звено 2 относительно точки A совершает вращательное движение, тогда можно записать
, но ,
где и – отрезки на плане скоростей, соответствующие скоростям и соответственно (точка “с” находится на конце вектора скорости ). Согласно исходным данным , тогда
.
Таким образом, можно записать
,
что позволяет определить положение точки “с” на плане скоростей путем деления отрезка на две равные части. Соединяют точку “p” с точкой “с” и получают графическое изображение вектора скорости , , величину которой определяют по формуле
.
Для определения скорости пользуются третьим векторным уравнением системы (2.1).Величина скорости известна, а ее направление показано на плане скоростей (отрезок pc). Вектор скорости направлен перпендикулярно оси звена 4.Величина скорости не известна, поэтому из конца вектора , т. е. из точки “с” плана скоростей, проводят линию, перпендикулярную оси звена 4. Далее, величина скорости неизвестна, но известно направление вектора этой скорости – параллельное прямой BD. Из полюса “p” плана скоростей проводят прямую параллельную прямой BD. Точка “d” пересечение прямой перпендикулярной CD с прямой параллельной BD определяет конец вектора скорости , , точки D механизма. Величину этой скорости определяют по формуле
.
План скоростей используют для определения угловых скоростей , звеньев 2,4. Можно записать
, .
Направление определяется следующим образом: мысленно переносят вектор скорости в точку B механизма, сохраняя его направление, ориентируясь на которое, можно определить направление вращения звена BA вокруг точки A – по часовой стрелке. Это и есть направление угловой скорости . Аналогичным образом определяется направление .
2.2 Определение ускорений точек звеньев и угловых
ускорений звеньев методом планов
Векторы ускорений точек звеньев механизма, схема которого показана на рисунке 2.1, связаны между собою следующими зависимостями:
(2.3)
Построение плана ускорений для заданного на рисунке 2.1 положения механизма осуществляется в следующем порядке.
- Рассматривают первое векторное уравнение системы (2.3) и записывают ускорение точки A для кривошипа (звено 1), вращающегося с постоянной угловой скоростью :
,
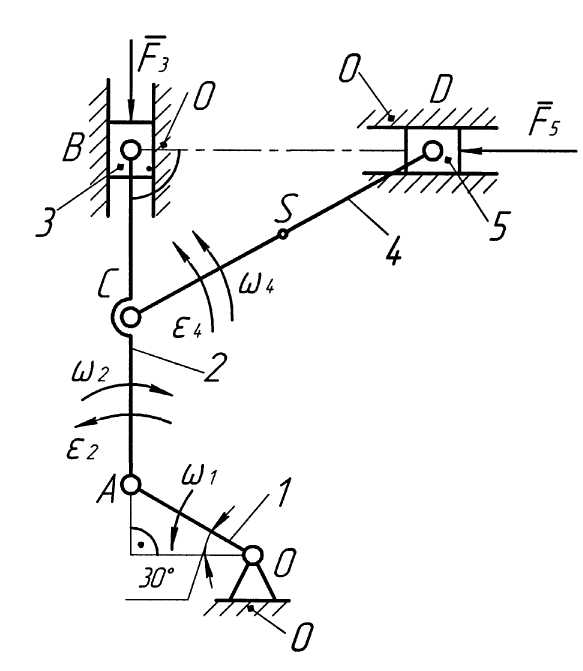 где , – векторы нормального и касательного (тангенциального) ускорений точки A соответственно.
где , – векторы нормального и касательного (тангенциального) ускорений точки A соответственно.
Величины и определяют по формулам
;
.
Так как , то и , для рассматриваемого случая . Далее из произвольной точки откладывают отрезок , представляющий собой в масштабе полное ускорение . Направление вектора совпадает с направлением вектора , т. е. от точки A к точке O.
Отрезок должен быть выбран таким образом, чтобы масштабный коэффициент обеспечивал удобства вычислений и построений других ускорений и их векторов. Отрезок принимают 40…50 мм. Его вычисляют следующим образом:
.
Ускорение точки B можно определить графически, используя равенство
. (2.4)
Рассмотрим левую часть равенства. Ускорение известно по величине и направлению (рисунок 2.1, в). Вектор нормального ускорения точки B относительно точки A известен по величине и направлению (направлен от BкAпо оси звена 2). Величина вектора ,
.
Вектор касательного ускорения точки B по отношению к точке A известен только по направлению – направлен по перпендикуляру к оси звена AB. Его величина