
Практическое занятие № 1
(принята сквозная нумерация пунктов содержания для 1, 2, 3 и 4 практических занятий)
1 Структурный анализ плоского рычажного механизма
Содержание
|
1.1 Звенья, кинематические пары и их классы |
||
|
1.2 Кинематические цепи |
||
|
1.3 Классы механизмов 1.4 Структурный анализ механизма |
1.1 Звенья, кинематические пары и их классы
Структурный анализ механизмов проводится с целью определения числа степеней свободы и класса механизма. Класс механизма определяется по классификации Асура-Артоболевского. Для структурного анализа используют структурно-кинематическую схему механизма – изображение механизма с помощью условных обозначений, выполненное в масштабе.
На рисунке 1.1 изображена кинематическая схема плоского рычажного механизма. В ее состав входят звенья (0, 1, 2, 3, 4, 5), образующие кинематические пары (1-0, 1-2, 2-3, 3-0, 2-4, 4-5, 5-0). Название звеньев: 1 – кривошип, 2 – шатун, 3 – ползун (поршень), 4 – шатун, 5 – ползун (поршень), 0 – стойка.
|
|
|
|
|
|
||
|
а) |
б) |
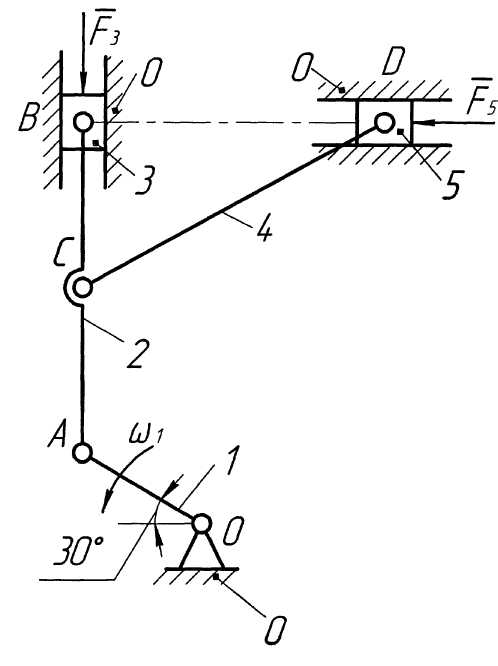
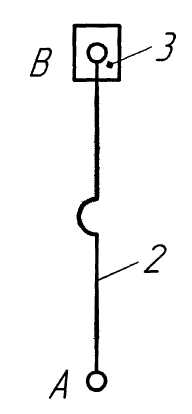
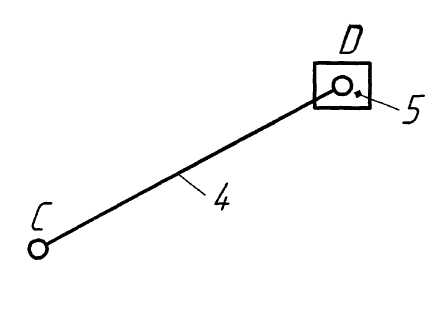
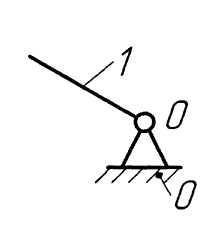
Рисунок 1.1 – Кинематическая схема механизма
Рассмотрим некоторые определения и сведения, касающиеся звеньев, кинематических пар и их классификации.
Одно или несколько жестко соединенных тел, входящих в состав механизма, называется звеном. Жестко соединенные тела, образующие звено, называют деталями.
Звено, принимаемое за неподвижное, называют стойкой. Звено, движение которому сообщается за счет приложения внешних сил или моментов сил, называют ведущим. Звенья механизма, положения и перемещения которых однозначно зависят от положений и перемещений ведущего звена, называют ведомыми.
Кинематической парой называют соединение двух соприкасающихся звеньев, допускающее их относительное движение (кинематические пары 1-0, 1-2, 2-3, 3-0, 2-4, 4-5, 5-0, рисунок 1.1).
Элементы кинематических пар – поверхности, линии, точки звена, по которым оно может соприкасаться с другим звеном. Если элементом пары является точка или линия, то эти пары называют высшими. К низшим парам относят такие, у которых элементами являются поверхности.
Одним из отличительных признаков кинематической пары является число связей – количество простейших относительных движений, которых лишаются звенья при соединении в кинематические пары.
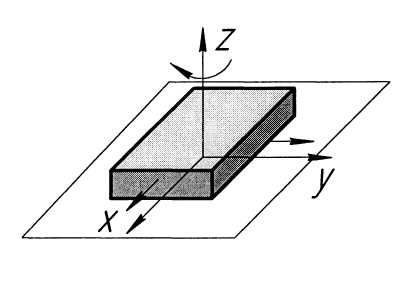
Известно, что свободное тело в пространстве может совершать шесть независимых простейших движений, три из которых – вращательные вокруг осей x, y, z и три – поступательные вдоль этих осей. В этом случае тело имеет шесть степеней свободы.
Если два звена, например ползун 5 и направляющая неподвижная стойка 0 (рисунок 1.1), соединены так, что допустима их относительная подвижность, то они образуют кинематическую пару, причем ползун теряет пять возможных простейших перемещений. Совершенно очевидно, что существуют случаи, когда одно звено механизма в своем движении относительно другого звена может потерять 5, 4, 3, 2 или 1 простейших движений. В соответствии с этим по И. И. Артоболевскому все кинематические пары разделяют на 5 классов. Номер класса кинематической пары определяется числом условий связи, которые наложены на движение одного звена пары относительно другого. Отсюда следует, что у пары 1-го класса одно звено не может совершать относительно другого одно какое-либо движение из шести возможных, т. е. имеет 5 степеней подвижности. Пара 2-го класса имеет звено, которое не может совершать два любых из шести движений, но обладает четырьмя степенями подвижности и т. д.
Класс кинематической пары определяют следующим образом. Одно из звеньев, входящих в кинематическую пару, представляют неподвижным и связывают с ним систему координат xyz. Ориентируясь по ней, необходимо проследить, какие движения другого звена пары невозможны из шести простейших, которые оно имело бы возможность совершать, не входя в пару. Число этих невозможных движений, равное числу связей, определяет номер класса кинематической пары. В таблице 1.1 представлены схематические и условные изображения кинематических пар и указаны их классы.
1.2 Кинематические цепи
Кинематической цепью называется совокупность звеньев, соединенных в кинематические пары. Кинематические цепи подразделяются на простые, сложные, замкнутые, незамкнутые.
Простой кинематической цепью называется такая, у которой каждое звено входит не более чем в две кинематические пары (рисунок 1.2). Кривошипно-шатунный механизм состоит из неподвижного звена – стойки и трех подвижных – 1, 2, 3. Кинематические пары: 1-0, 1-2, 2-3, 3-0. Каждое звено входит не более чем в две кинематические пары.
|
|
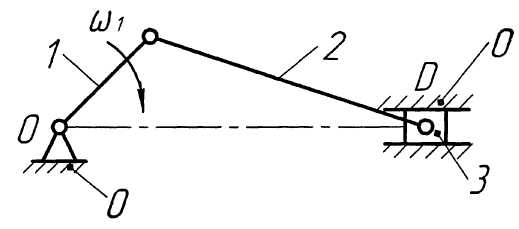
Рисунок 1.2 – Кинематическая схема кривошипно-шатунного механизма
Таблица 1.1 – Схематические и условные изображения кинематических пар
|
Схематическое изображение кинематических пар |
Условное изображение |
Число условий связи |
Количество свобод относительного движения |
Класс кинематической пары |
|
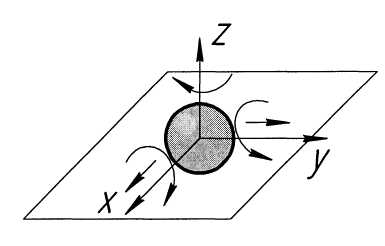
Шар на плоскости |
|
1 |
5 |
1 |
|
|
||||
|
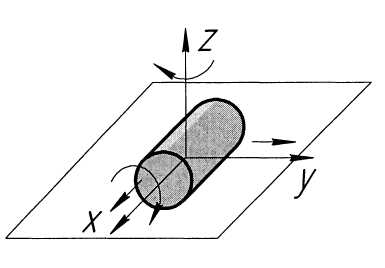
Цилиндр на плоскости |
|
2 |
4 |
2 |
|
|
||||
|
Призма на плоскости |
|
3 |
3 |
3 |
|
|
||||
|
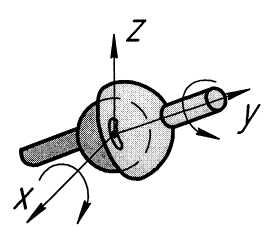
Сферическая |
|
3 |
3 |
3 |
|
|
||||
|
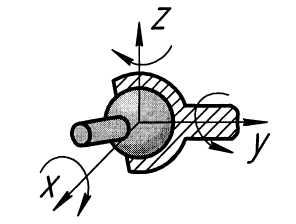
Сферическая с пальцем |
|
4 |
2 |
4 |
|
|





Продолжение таблицы 1.1