
Каждому столбцу этой таблицы соответствует определенная структурная группа Ассура (диада, триада, …). На рисунке 1.5 показана двухповодковая структурная группа или диада, соответствующая первому столбцу таблицы 1.2.
Элементы A и C звеньев 1, 2 являются свободными и ими диада присоединяется к механизму. Будучи присоединенной своими свободными элементами к стойке, диада будет иметь число степеней свободы, равное нулю. Именно в этом смысле она является кинематической цепью с числом степеней свободы, равным нулю. Если же диада будет присоединена своими свободными элементами к механизму, то она не изменит его числа степеней свободы. Эти соображения в полной мере можно отнести к структурной группе – триаде.
|
|
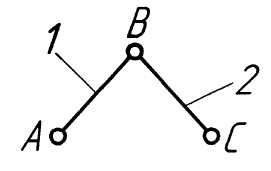
Рисунок 1.5 – Диада – двухповодковая структурная группа Ассура
Любая вращательная кинематическая пара структурной группы может быть заменена поступательной. В связи с этим различают 5 модификаций диады (первая показана на предыдущем рисунок 1.5). На рисунке 1.6 показаны модификации диады.
|
|
|
|
|
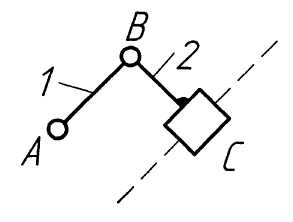
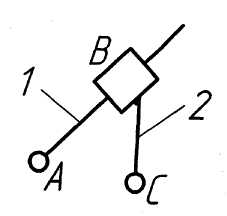
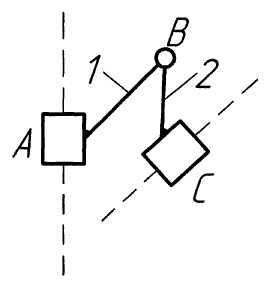
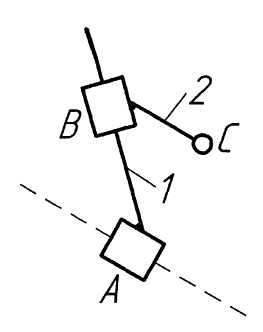
Рисунок 1.6 – Модификации диады
Длина поводка 2 от шарнира B к поступательной кинематической паре может равняться нулю, тогда эти же модификации диады будут выглядеть, как показано на рисунке 1.7:
|
|
|
|
|
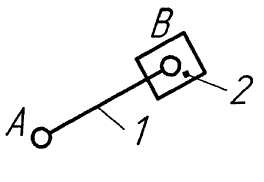
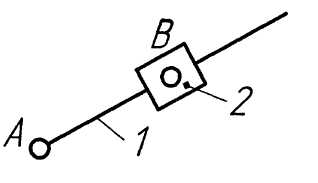
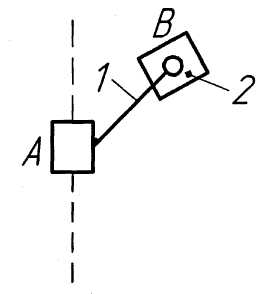
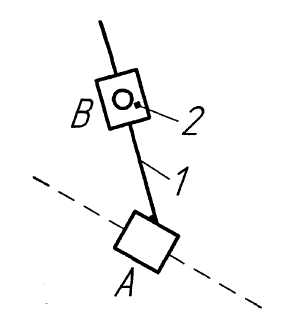
Рис. 1.7 – Модификации диады при длине поводка 2, равной нулю
К структурным группам применяют понятия класса и порядка. Порядок структурной группы определяется числом свободных элементов, которыми она присоединяется к основному механизму. Таким образом, диада является структурной группой второго порядка (два свободных элемента A и C звеньев 1, 2).
Класс структурной группы определяется числом кинематических пар, входящих в высший замкнутый контур группы. Высшим замкнутым контуром диады является звено, которое может образовывать две кинематические пары. Следовательно, диада является группой 2-го класса.
Второму столбцу таблицы 1.2 соответствует трехповодковая структурная группа или триада (рисунок 1.8).
|
|
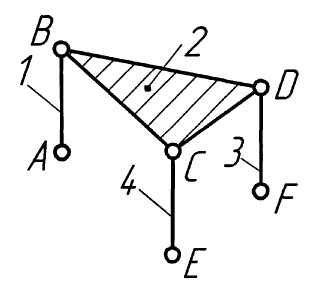
Рисунок 1.8 – Триада – трехповодковая структурная группа
Триада присоединяется к основному механизму тремя свободными элементами A, E, F и является структурной группой третьего порядка. Высшим замкнутым контуром триады является треугольник BDC, который может образовать только три кинематические пары, поэтому это структурная группа 3 класса.
Структурные группы более высоких классов весьма редко находят применение при образовании механизмов, поэтому следующие структурные группы (3, 4 и другие столбцы таблицы 1.2) не рассматриваются.
В рассматриваемой классификации к механизмам применяется только понятие класса. Класс механизма определяется классом наивысшей структурной группы, входящей в его состав. Для определения класса механизма проводят его структурный анализ, т. е. разбивают его на структурные группы.
1.4 Структурный анализ механизма
В соответствии с принципом структурного образования механизм должен состоять из структурных групп и ведущего звена (или ведущих звеньев) со стойкой. Выбирается ведущее (начальное) звено, которое обязательно должно образовывать со стойкой кинематическую пару V класса. Затем производится разбивка оставшейся кинематической цепи механизма на простейшие группы Ассура. Разбивку механизма следует начинать со звеньев, наиболее удаленных от ведущего звена. Вначале делается попытка разложить механизм на наиболее простые структурные группы, т. е. диады. Если это окажется невозможным, то пытаются разложить на триады или диады и триады. Необходимо помнить, что каждая кинематическая пара и каждое звено могут входить только в одну структурную группу или начальный механизм, образованный ведущим звеном со стойкой. По классу наивысшей структурной группы, входящей в состав механизма, определяется его класс.
Рассмотрим пример структурного анализа механизма, схема которого изображена на рисунке 1.1. В этом механизме шесть звеньев из них пять – подвижные, т. е. . Данные о кинематических парах поместим в таблицу 1.3. Число пар IV-го класса , пар V-го класса .
Таблица 1.3 — Данные о кинематических парах
|
Пары |
Звенья, образующие пару |
Класс пары |
Тип пары |
|
1 |
1-0 |
V |
Вращательная |
|
2 |
1-2 |
V |
Вращательная |
|
3 |
2-3 |
V |
Вращательная |
|
4 |
3-0 |
V |
Поступательная |
|
5 |
2-4 |
V |
Вращательная |
|
6 |
4-5 |
V |
Вращательная |
|
7 |
5-0 |
V |
Поступательная |
Число степеней свободы плоского механизма вычисляют по формуле Чебышева:
.
Так как , то движение механизма определяется заданием одного параметра, например, угла поворота звена 1.
На схеме механизма выделяют структурные группы Ассура и определяют их классы. Отделение структурных групп проводят в следующем порядке (рисунок 1.1, б):
а) (шатун 4 – ползун 5) – группа II класса 2-го порядка;
б) (шатун 2 – ползун 3) – группа II класса 2-го порядка;
в) (стойка 0 – кривошип 1) – начальный механизм I-го класса.
Таким образом, в результате структурного анализа установлено, что рассмотренный механизм образован последовательным присоединением к начальному механизму двух структурных групп, состоящих из звеньев 2, 3 и 4, 5. Так как наивысшим классом присоединенных структурных групп является второй, то данный механизм по классификации Ассура – Артоболевского относится к механизмам II класса.
Структурная формула механизма:
I(01) → II(2 – 3) + II(4 – 5),
где I(01) – начальный механизм I класса;
II(2 – 3), II(4 – 5) – структурные группы II класса (диады).