
|
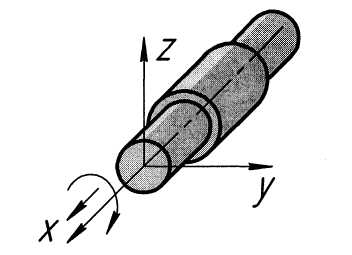
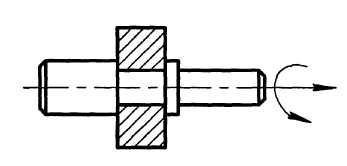
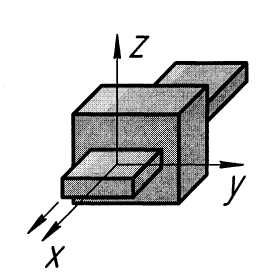
Схематическое изображение кинематических пар |
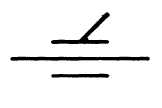
Условное изображение |
Число условий связи |
Количество свобод относительного движения |
Класс кинематической пары |
|
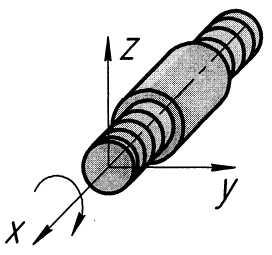
Цилиндрическая
|
|
4 |
2 |
4 |
|
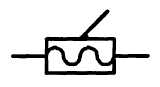
Вращательная |
|
5 |
1 |
5 |
|
|
||||
|
Поступательная |
|
5 |
1 |
5 |
|
|
||||
|
Винтовая |
|
5 |
1 |
5 |
|
|



Сложной называется такая кинематическая цепь, у которой имеется хотя бы одно звено, входящее более чем в две кинематические пары (рисунок 1.1). Звено 2 входит в следующие кинематические пары 1-2, 2-3, 2-4.
Замкнутой кинематической цепью называется цепь, каждое звено которой входит, по крайней мере, в две кинематические пары (рисунки 1.1, 1.2).
Незамкнутой кинематической цепью называется цепь, у которой есть звенья, входящие только в одну кинематическую пару (рисунок 1.3). Звено 5 входит только в одну кинематическую пару 4-5.
С точки зрения структуры механизм – это замкнутая кинематическая цепь, у которой, при заданном движении одного или нескольких звеньев (ведущих) относительно неподвижного звена (стойки), все остальные звенья (ведомые) совершают однозначно определяемые движения.
|
|
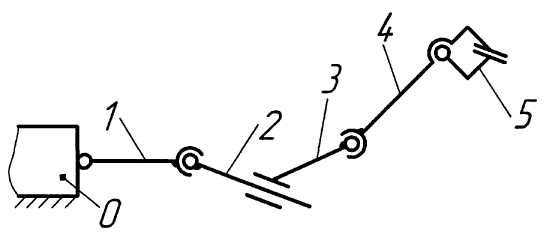
Рисунок 1.3 – Кинематическая схема манипулятора
(механизм с незамкнутой кинематической цепью)
Для проектируемого механизма необходимо знать, какое количество звеньев, связанных со стойкой, должно быть ведущими для того, чтобы движение механизма было вполне определенным. Для этого вычисляют число степеней свободы W механизма относительно стойки, которое показывает количество ведущих звеньев.
Большинство механизмов, используемых в технике, имеют число степеней свободы, равное единице и, следовательно, должны иметь одно ведущее звено. Все механизмы можно разделить на плоские и пространственные. У плоского механизма точки его звеньев описывают траектории, лежащие в параллельных плоскостях. У пространственного механизма точки его звеньев описывают неплоские траектории, лежащие в пересекающихся плоскостях.
1.3 Классы механизмов
Кинематическая схема механизма дает полное представление о структуре механизма и определяет его кинематические свойства. Она выполняется графическим способом с использованием условных обозначений звеньев, кинематических пар и указанием размеров, которые необходимы для кинематического анализа механизма.
На кинематических схемах механизмов звенья изображаются отрезками прямых и нумеруются арабскими цифрами. Кинематические пары обозначаются заглавными буквами латинского алфавита и схематически изображаются так, как показано на рисунке 1.4. Элементы высших кинематических пар очерчиваются кривыми, которыми они характеризуются в натуральном виде.
Механизмы подразделяются на классы. В основу классификации положен принцип структурного образования механизмов, сформулированный в 1914 году русскими учеными Л. В, Ассуром и И. И. Артоболевским.
Согласно этому принципу схема любого механизма может быть составлена последовательным присоединением к ведущему звену (или к ведущим звеньям) и стойке кинематических цепей с числом степеней свободы, равным нулю, т. е. . Такие кинематические цепи называют структурными группами или группами Ассура.
|
|
– шарнирное соединение двух подвижных звеньев (1, 2) (вращательная кинематическая пара A, Vкласса) |
|
|
|
– шарнирное соединение подвижного звена 1 со стойкой 0 (вращательная кинематическая пара В, Vкласса) |
|
|
|
– соединение двух подвижных звеньев (поступательная кинематическая пара Vкласса) |
|
|
|
– соединение подвижного звена 1 со стойкой 2 (поступательная кинематическая пара Vкласса) |
|
|
|
– шарнирное соединение двух звеньев, если одно из звеньев не заканчивается в шарнире (вращательная кинематическая пара A,Vкласса) |
|
|
|
– звено, входящее в три кинематические пары |
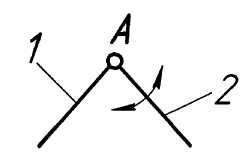
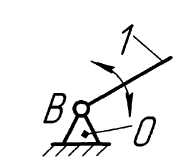
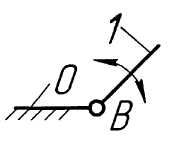
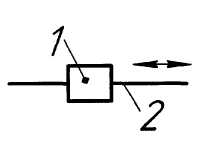
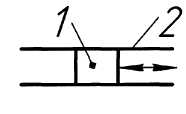
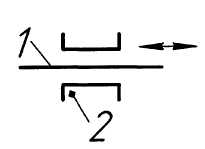
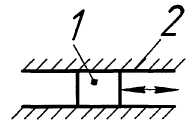
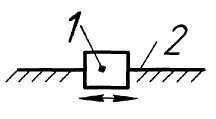
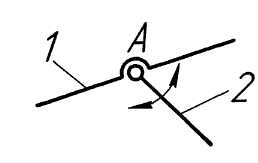
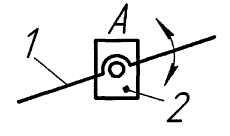
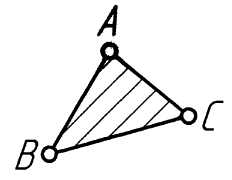
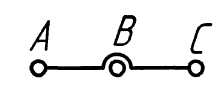
Рисунок 1.4 – Схематическое изображение
кинематических пар
Группа Ассура – это кинематическая цепь с нулевой степенью свободы относительно тех звеньев, с которыми входят в кинематические пары свободные элементы ее звеньев, и не распадающуюся на более простые цепи с нулевой степенью свободы.
Согласно структурной формуле Чебышева для плоской кинематической цепи число степеней свободы механизма можно вычислить следующим образом:
,
где – число подвижных звеньев;
число пар V класса;
– число пар IV класса.
Таким образом, для структурной группы (группы Ассура) можно записать:
.
При составлении схемы механизма из кинематических цепей рассматриваются структурные группы, включающие в себя только кинематические пары V класса. Если же исследуемый механизм имеет пары IV класса, они определенным образом заменяются двумя кинематическими парами V класса.
Запишем , откуда , т. е. число кинематических пар V класса, входящих в структурную группу, должно равняться числа входящих в нее подвижных звеньев. Так как число кинематических пар может быть только целым, то число звеньев группы должно быть только четным. Следовательно, могут иметь место только следующие сочетания чисел подвижных звеньев и кинематических пар V класса, входящих в структурную группу Ассура (таблица 1.2).
Таблица 1.2 – Сочетание чисел звеньев и кинематических пар, входящих в структурную группу Ассура
|
Число подвижных звеньев, |
2 |
4 |
6 |
8… |
|
Число пар V класса, |
3 |
6 |
9 |
12… |
|
Название групп Ассура |
Диада |
Триада |
… |
… |