
Практическая работа №3.
«Система сходящихся сил» рассматриваются задачи на определение реакций связей несвободного твердого тела, которые можно решать геометрическим и аналитическим способами.
- Геометрический способ решения рекомендуется проводить в следующем порядке: 1)выделить тело, равновесие которого следует рассмотреть для отыскания искомых величин;
- изобразить заданные силы;
- геометрически решить силовой многоугольник и определить искомые величины.
- Аналитический способ решения задачи рекомендуется проводить в следующем порядке:
- выделить тело, равновесие которого следует рассмотреть для отыскания неизвестных величин;
- изобразить заданные силы;
- составить уравнения равновесия тела в проекциях на оси координат:
- решить полученную систему уравнений равновесия и определить искомые силы.
 Пример выполнения задания 3.1.
Пример выполнения задания 3.1.
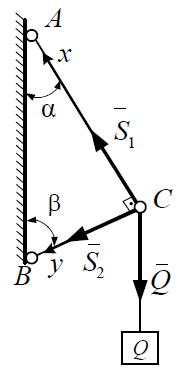
Груз Q удерживается в равновесии двумя стержнями АС и ВС, соединенными между собой и с вертикальной стеной шарнирами (рис. 3.1). Определить усилия в стержнях, считая их невесомыми, если углы, составляемые стержнями АС и ВС со стеной соответственно равны α и β . Решить задачу при следующих данных:
Q = 300 Н, α = 30о, β = 60о.
Решение. Рассмотрим равновесие шарнира С, и изобразим действующие на него силы: сила тяжести груза Q , S1 и S 2 реакции невесомых стержней АС и ВС соответственно, направленных по стержням в предположении, что они оба растянуты (рис. 3.1).
Для определения искомых усилий и можно воспользоваться геометрическим или аналитическими условиями равновесия. Рассмотрим оба способа решения задачи.
- Геометрический способ. Согласно (3.1)
+ + = 0, (3.3)
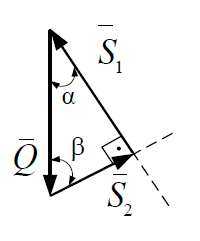 т.е. треугольник, построенный на этих силах, должен быть замкнут.
т.е. треугольник, построенный на этих силах, должен быть замкнут.
Построение начинаем в произвольной точке
плоскости с известной по модулю направлению
силы . Через начало и конец вектора проводим
прямые, параллельные силам и . Точка
пересечения этих прямых даст третью вершину
треугольника. Направление обхода треугольника Рисунок 3.2
согласно (3.3), т.е. направления векторов и задает вектор (рис. 3.2)
Заметим, что направление вектора на рис 3.2 противоположно его первоначально выбранному направлению на рис. 3.1. Это означает, что предположение о том, что в положении равновесия стержень ВС растянут неверно; в действительности стержень ВС сжат.
Определим величины усилий
S1 = Q cos α = 260 H;
S2 = Q cosβ = 150 H.
- Аналитический способ. Согласно (3.1)
Проводим в точке С координатные оси Сx по стержню АС, а Сy по стержню ВС, так как по условию задачи угол АВС=90º (рис. 3.1) Записываем аналитические условия равновесия тела при действии плоской системы сходящихся сил (3.2):
Проецируя уравнение (3.3) на выбранные оси, получаем
– Q cos α +S1 = 0;
Q cosβ + S2
Решая эти уравнения находим S1 = 260 Н; S2 = – 150 Н
Вывод сила реакции стержня S2 направлена от вертикальной стены по стержню от В к С.
= 0.
Пример выполнения задания 3.2. Балка АВ шарнирно закреплена на опоре А, а у конца В она положена на катки (рис. 3.3, а). В середине балки, под углом α = 450 к её оси, действует сила F. Определить реакции опор, пренебрегая весом балки.
Решить задачу при следующих данных:
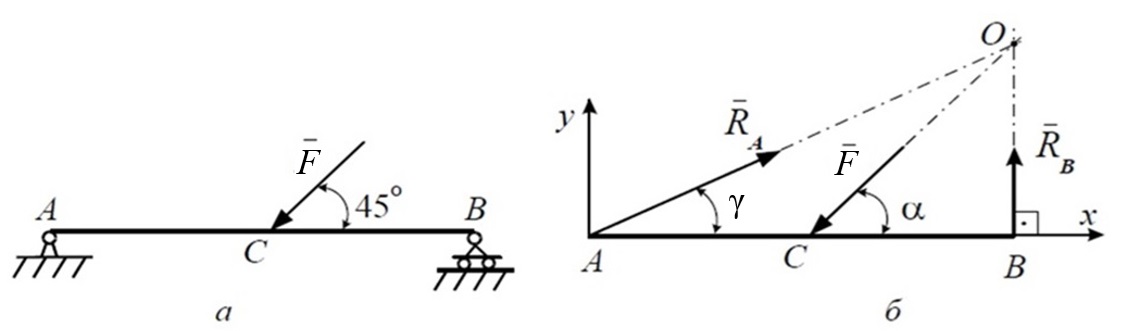 F = 2 кН, АС = СВ = 2 м. α =45º
F = 2 кН, АС = СВ = 2 м. α =45º
Рисунок 3.3
Решение. Рассмотрим равновесие балки АВ находящейся под действием силы F.
По теореме о трёх силах RA реакция опоры А проходит через точку О пересечения линий действия сил F и RВ (рис 3.3, б). Следовательно, балка АВ находится под действием плоской системы сходящихся сил. Для решения задачи введем декартовую систему координат Axy и запишем аналитические условия равновесия (3.2) для рассматриваемой задачи
RA cos γ – F cos α = 0,
RA sin γ – F sin α + RB = 0, (3.4)
Вычислим входящие в (3.4) синус и косинус угла α и угла γ. Треугольник СВО является прямоугольным и равнобедренным СВ = ВО = 2 м. Из прямоугольного треугольника АВО по теореме Пифагора находим гипотенузу АО
= 2 ≈ 4,47
Тогда cos γ = ≈ 0,89 sin γ = ≈ 0,45
Далее из (3.4) определяем искомые реакции балки АВ:
RA ≈ 1,58 kH;
 RB ≈ 0,71 kH;
RB ≈ 0,71 kH;
Пример выполнения задания 3.3
Определить модуль равнодействующей двух равных по
(рис.3.4, а) величине сходящихся сил F1 = F2 = 10 H , образующих между собой угол α = 60º
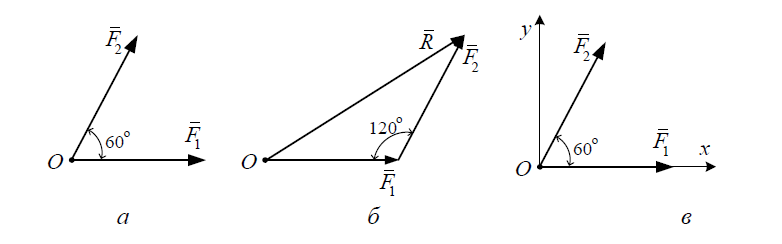
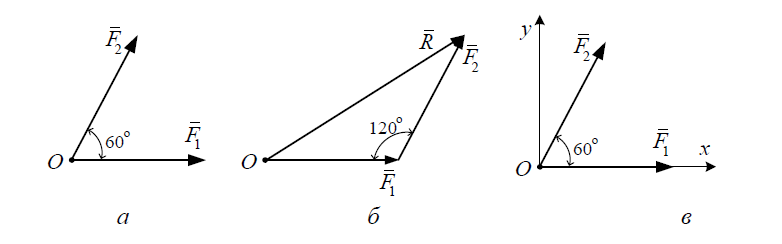
Рисунок 3.4
- Геометрический способ. Вектор равнодействующей R определим по теореме косинусов
≈ 17,3 H.
- Аналитический способ. Введем в точке О декартовую систему координат Оху, направив ось Ох по силе F1 (рис. 3.4, в) вычислим проекции равнодействующей R на декартовые оси:

|
Номер варианта |
3.1 |
3.2 |
3.3 |
||||||
|
α, град. |
Q, H |
P, kH |
АС,м |
СВ,м |
α град. |
F1, kH |
F2, kH |
α, град. |
|
|
1 |
30 |
180 |
45 |
3 |
3 |
20 |
4 |
6 |
20 |
|
2 |
45 |
250 |
60 |
5 |
5 |
35 |
7 |
7 |
25 |
|
3 |
60 |
170 |
30 |
2 |
5 |
40 |
3 |
3 |
30 |
|
4 |
45 |
220 |
30 |
3 |
5 |
30 |
4 |
4 |
45 |
|
5 |
30 |
350 |
45 |
4 |
4 |
35 |
6 |
6 |
60 |
|
6 |
60 |
400 |
60 |
7 |
7 |
25 |
9 |
8 |
30 |
|
7 |
15 |
200 |
60 |
5 |
5 |
50 |
12 |
25 |
55 |
|
8 |
75 |
500 |
30 |
3 |
6 |
35 |
18 |
12 |
60 |
|
9 |
20 |
350 |
60 |
2 |
2 |
25 |
30 |
21 |
25 |
|
10 |
25 |
450 |
30 |
1 |
3 |
45 |
4 |
7 |
30 |
|
11 |
30 |
200 |
45 |
4 |
4 |
40 |
8 |
6 |
45 |
|
12 |
45 |
150 |
45 |
6 |
6 |
35 |
5 |
7 |
70 |
|
13 |
60 |
300 |
45 |
7 |
7 |
50 |
12 |
18 |
50 |
|
14 |
30 |
350 |
30 |
4 |
4 |
20 |
19 |
15 |
30 |
|
15 |
55 |
400 |
60 |
6 |
6 |
35 |
24 |
12 |
60 |
|
16 |
60 |
320 |
45 |
8 |
8 |
20 |
12 |
8 |
75 |
|
17 |
25 |
280 |
30 |
5 |
5 |
45 |
2 |
3 |
20 |
|
18 |
30 |
270 |
60 |
2 |
3 |
30 |
14 |
17 |
35 |
|
19 |
45 |
230 |
45 |
3 |
2 |
25 |
11 |
17 |
40 |
|
20 |
70 |
580 |
30 |
4 |
4 |
55 |
13 |
11 |
35 |
|
21 |
50 |
550 |
45 |
6 |
5 |
35 |
11 |
11 |
50 |
|
22 |
30 |
400 |
60 |
5 |
4 |
40 |
3 |
5 |
75 |
|
23 |
60 |
300 |
45 |
4 |
4 |
30 |
2 |
2 |
50 |
|
24 |
45 |
250 |
30 |
3 |
3 |
45 |
7 |
7 |
25 |
|
25 |
30 |
150 |
45 |
2 |
1 |
60 |
9 |
11 |
50 |